마이클잭슨의 문워크를 똑같이 하는 휴머노이드가 등장했다.
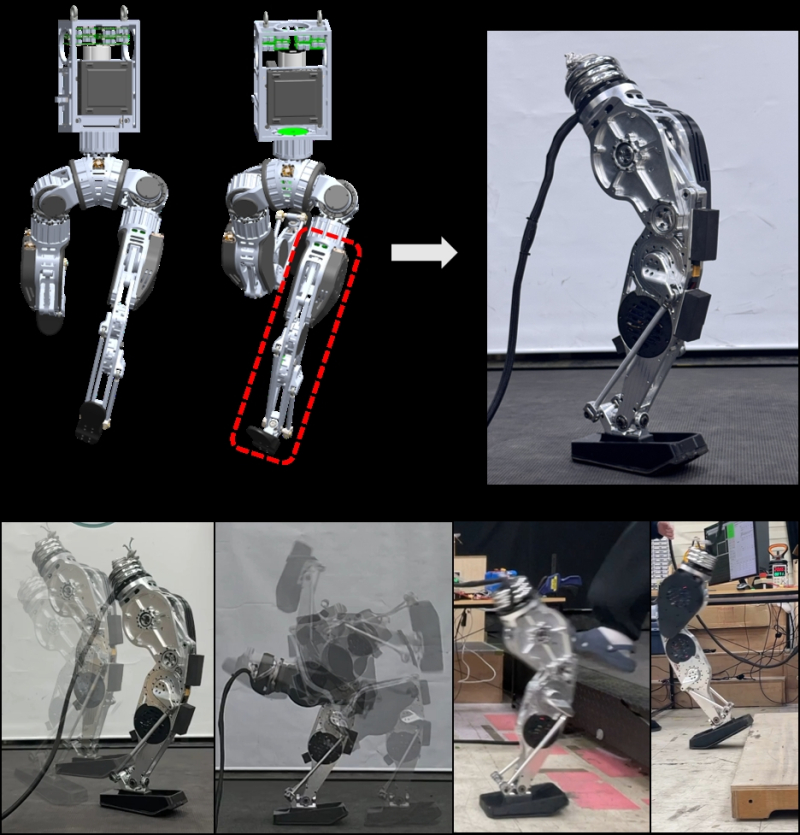
KAIST 기계공학과 휴머노이드로봇연구센터(휴보랩) 박해원 교수팀이 차세대 휴머노이드 로봇의 하체플랫폼을 독자 개발했다.
이번 연구는 신장 165㎝에 체중 75㎏을 목표로 인간환경에 맞춰 설계했다.
이 로봇은 시속 12㎞(초속 3.25m)로 뛸 수 있고 30㎝ 이상의 단차도 보행해 턱, 계단, 장애물 등을 극복할 수 있다.
여기에 눈감은 상태나 험지에서 균형을 잃지 않는 탁월한 안정성을 갖췄다. 특히 오리걸음, 문워크 등 고난도 동작을 구현할 수 있어 하며 다양한 동작이 필요한 산업현장에서 활용성이 높을 전망이다.
이번에 개발한 하체플랫폼은 모터, 감속기, 모터드라이버 등 모든 핵심부품을 연구팀이 직접 설계·제작해 하드웨어 기술 독립을 달성했다.
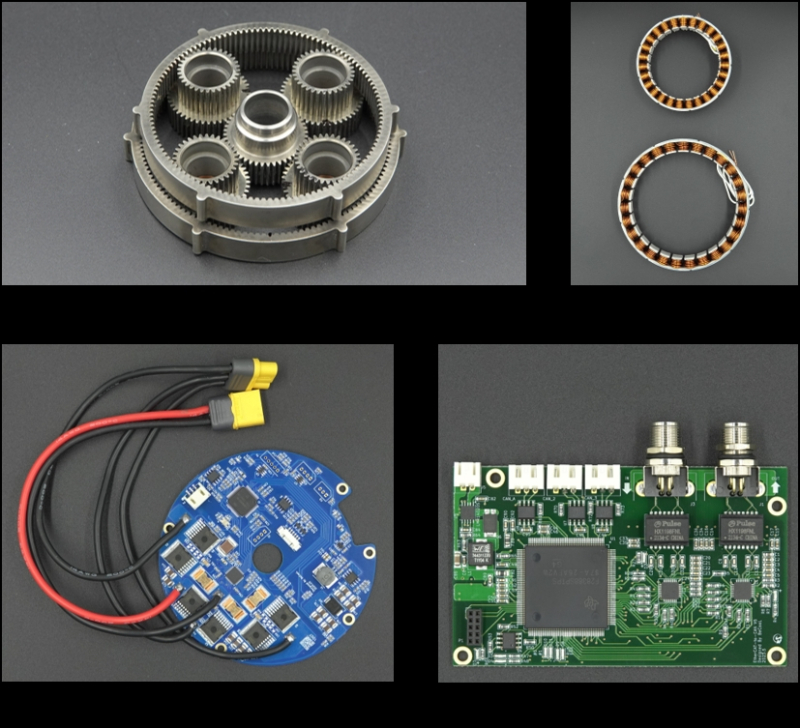
아울러 자체개발한 강화학습 알고리즘으로 인공지능(AI) 제어기를 훈련하고 시뮬레이션-현실 간 격차를 극복해 실환경에 성공적으로 적용해 소프트웨어 측면에서도 기술 독립성을 확보했다.
연구팀은 향후 주행속도 시속 14㎞에 단차 40㎝ 극복, 사다리 등반 등 성능을 고도화할 계획이다.
이와 함께 연구팀은 이번 개발과정에서 단일다리 기반 홉핑 로봇도 제작했다.
이 로봇은 한 발로 균형을 유지하며 반복적으로 뛰는 고난도 동작에 성공하고, 360도 공중제비 같은 극한 운동능력도 구현했다.
특히 생물학적 참고 모델이 없어 모방학습이 불가능한 상황에서 질량중심 속도를 최적화해 착지충격을 줄이는 AI 제어기를 강화학습으로 실현했다.
연구팀은 KAIST 기계공학과 황보제민 교수팀의 로봇팔, MIT 김상배 교수팀의 로봇손, KAIST 전기및전자공학부 명현 교수팀의 측위 및 내비게이션), KAIST 김재철 AI대학원 임재환 교수팀의 시각기반 조작지능과 협력해 상체까지 갖춘 완전 휴머노이드 하드웨어와 AI 구현을 추진 중이다.
완성된 로봇은 중량물 운반, 밸브·크랭크·문고리 조작은 물론 보행과 조작이 동시에 요구되는 카트 밀기, 사다리 오르기 등 복합작업을 수행할 수 있다.
이는 실제 산업현장의 복잡한 작업요구에 대응할 수 있는 신체능력을 확보할 것으로 기대된다.
박 교수는 “이번 성과는 핵심 부품부터 AI 제어기까지 자체 기술로 확보함으로써 휴머노이드 연구의 하드웨어와 소프트웨어 양 측면에서 독립성을 달성한 중요한 이정표”라며 “향후 상체까지 포함한 완전형태 휴머노이드로 발전시켜 실제 산업 현장의 복잡한 요구를 해결하고, 사람과 함께 일하는 차세대 로봇으로 발전시킬 것”이라고 말했다.
한편, 이번 연구는 KAIST 기계공학과 최종훈 박사과정이 제1저자로서 참여했고, 내달 1일 열리는 ‘국제 휴머노이드로봇전문학회(Humanoids 2025)’에서 발표할 예정이다.
아울러 공동 제1저자인 기계공학과 강동윤·김기정·최종훈 박사과장은 오늘 29일 열리는 로봇지능 분야 최고 학회‘CoRL 2025’에서 AI 알고리즘 성과를 발표한다.

(발표논문: Learning Impact-Rich Rotational Maneuvers via Centroidal Velocity Rewards and Sim-to-Real Techniques: A One-Leg Hopper Flip Case Study, Conference on Robot Learning (CoRL), Seoul, Korea 2025, Dongyun Kang, Gijeong Kim, JongHun Choe, Hajun Kim, Hae-Won Park, arxiv 버전: https://arxiv.org/abs/2505.12222)
(발표논문: Design of a 3-DOF Hopping Robot with an Optimized Gearbox: An Intermediate Platform Toward Bipedal Robots, IEEE-RAS, International Conference on Humanoid Robots, Seoul, Korea, 2025, JongHun Choe, Gijeong Kim, Hajun Kim, Dongyun Kang, Min-Su Kim, Hae-Won Park, arxiv 버전: https://arxiv.org/abs/2505.12231)