KAIST 산업디자인학과 배석형 교수팀과 기계공학과 황보제민 교수팀이 공동개발 한 ‘로봇스케치’ 기술이 최근 일본 도쿄서 열린 ‘시그래프 아시아 2024, 리얼타임 라이브’에서 최우수 심사위원상을 수상했다.
시그래프 리얼타임 라이브는 컴퓨터 그래픽스 및 상호작용 분야에서 매년 엄선된 10여 개 혁신기술만 무대에 오른다. 모든 시연은 실시간으로 6분 내에 기술의 독창성과 가능성을 선보여야 한다.

KAIST 로봇스케치는 3D 스케칭 전문가인 배 교수팀과 로봇 강화학습 전문가인 황보 교수팀의 협업으로 완성됐다.
이번 대회에서 로봇스케치는 단순히 외형과 구조를 시각적으로 표현하는 설계 도구를 넘어 3D 스케칭에 생성형 AI와 몰입형 VR을 접목, 로봇 디자인의 개념을 새롭게 정의한 혁신기술로 평가받았다.
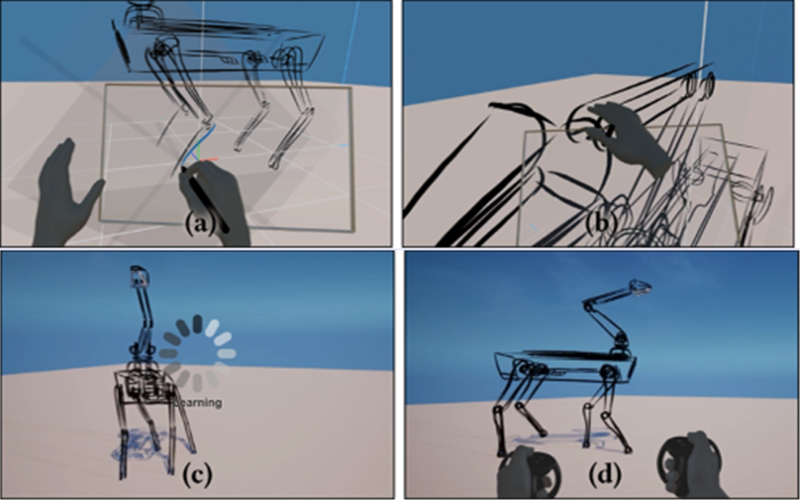
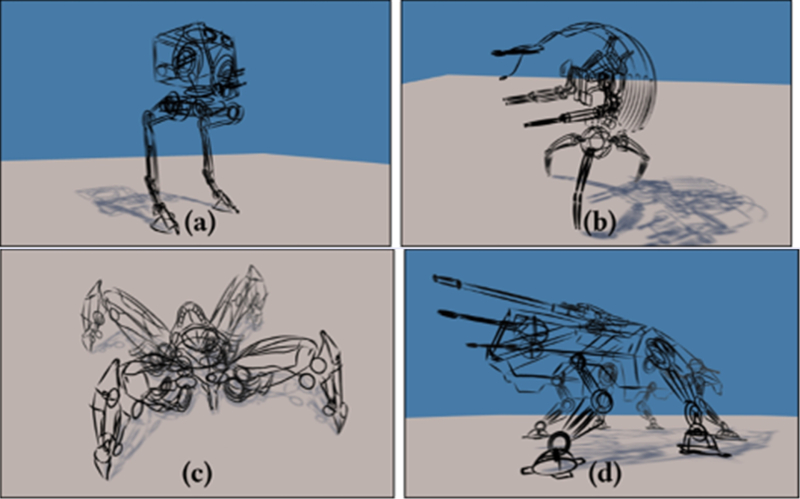
이를 이용하면 디자이너는 VR로 태블릿과 펜을 사용해 복잡한 관절구조를 직관적으로 표현하고, 이를 실제 크기로 확인할 수 있다.
또 디자이너가 그린 로봇은 강화학습을 통해 현실세계의 물리법칙을 따르는 시뮬레이션에서 보행법과 움직임을 학습한다.
이를 통해 디자이너는 실제 세계에서 작동 가능한 로봇 디자인을 VR로 만들고, 로봇을 동작시키며 자연스러운 움직임과 안정성을 실시간 확인할 수 있다.
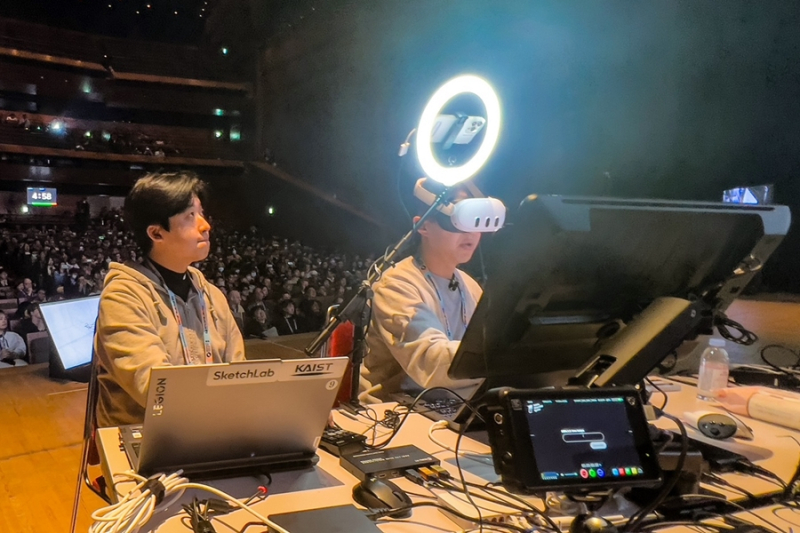
실제 이번 대회 시연에서 KAIST 이준협 박사는 VR 헤드셋을 착용하고 태블릿과 펜으로 가상공간에 복잡한 관절 구조의 4족 거미로봇을 단 몇 분 만에 완성했다. 이어 컨트롤러를 조작으로 움직이는 거미로봇이 일어나 2족 휴머노이드 로봇으로 자세를 수정해 걸음을 내딛는 것을 구현해 호평을 받았다.
배 교수는 “로봇스케치는 기존 로봇 디자인의 한계를 극복하고, 디자이너가 상상하는 모든 것을 실시간으로 표현할 수 있는 도구”라며 “로봇 디자인은 단순 외형뿐 아니라 움직임과 기능, 나아가 사용자와의 상호작용까지 모두 포함하는 과정으로, 디자이너와 엔지니어의 원활한 소통으로 로봇 개발과 제품화 과정에 중요한 도구가 될 것”이라고 설명했다.
한편, 이번 성과는 3D 스케칭, AI, VR 기술을 결합한‘DRB-KAIST 스케치더퓨처연구센터’의 지원을 받아 진행됐다.